

 小齿轮 汝州一中朱现伟
小齿轮 汝州一中朱现伟2022年12月03日
#物联网应用#SIOT 行空板+摇杆 遥控 -仰望-”新能源“小车

这个帖子继续尝试对仰望小车的遥控。
【目标任务】
用行空板+摇杆模块进行遥控。
【器材准备】
仰望小车 行空板 摇杆模块
【软件准备】
行空板 mind+
乐动掌控 mPython
step1 行空板+摇杆测试
认识摇杆模块:

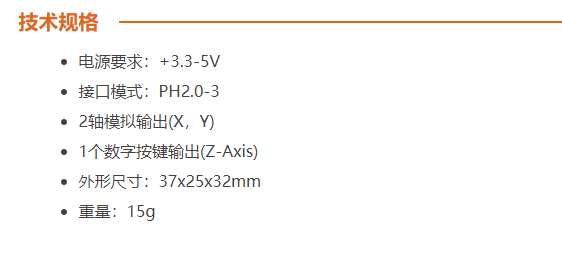
我将X接入行空板P21引脚,y接入P22引脚,Z接入P23引脚,编写如下程序测试读数。
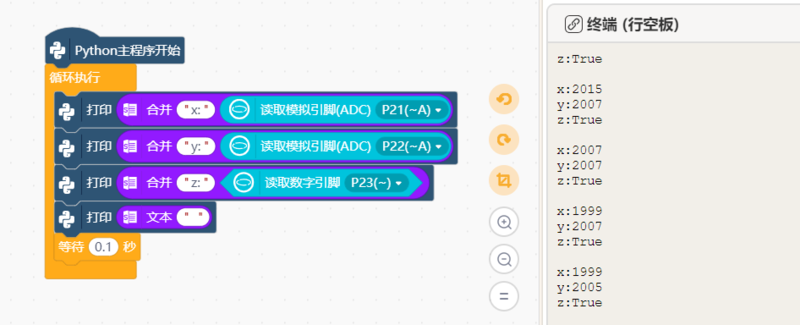
X Y的在中间位置时读数约为2000+-50,模拟值范围0-4095。向模块上所示箭头方向推动时由小变大,反向由大变小。
Z为数字按钮,按下为False ,不按为True。
搞清楚这些,就可以写程序了。
我们约定:
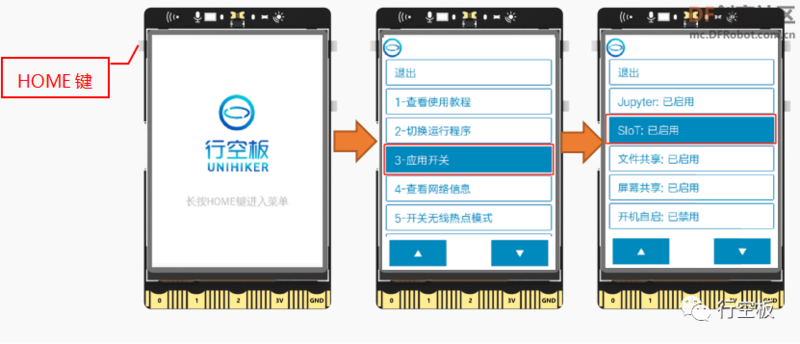
1、开启行空板板载热点,掌控板接入热点。

2、运行行空板上的SIOT,行空和掌控订阅相同的5个主题进行消息传递。
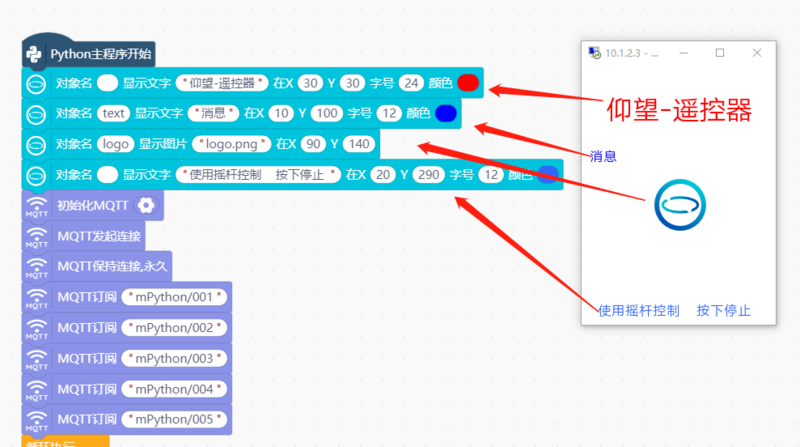
行空摇杆遥控器
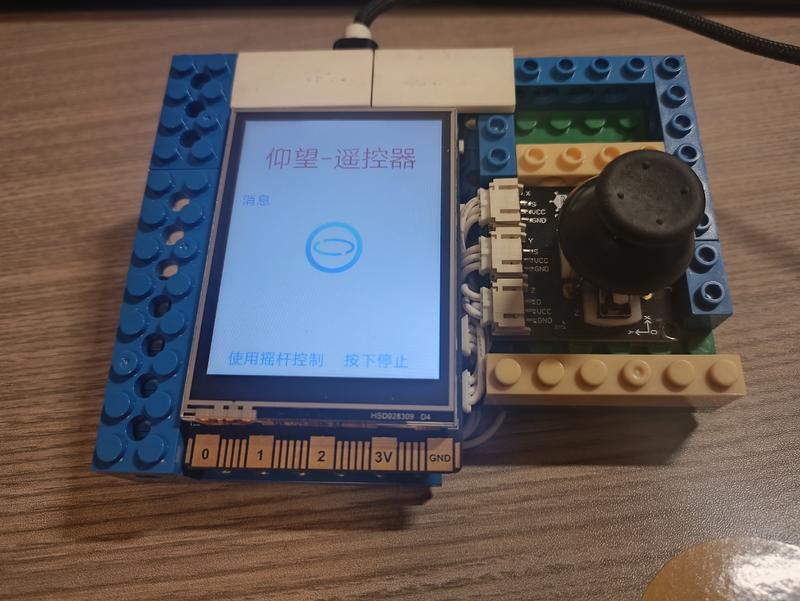
行空程序:

上面的测试直接在行空板上都可以完成的。太香了。
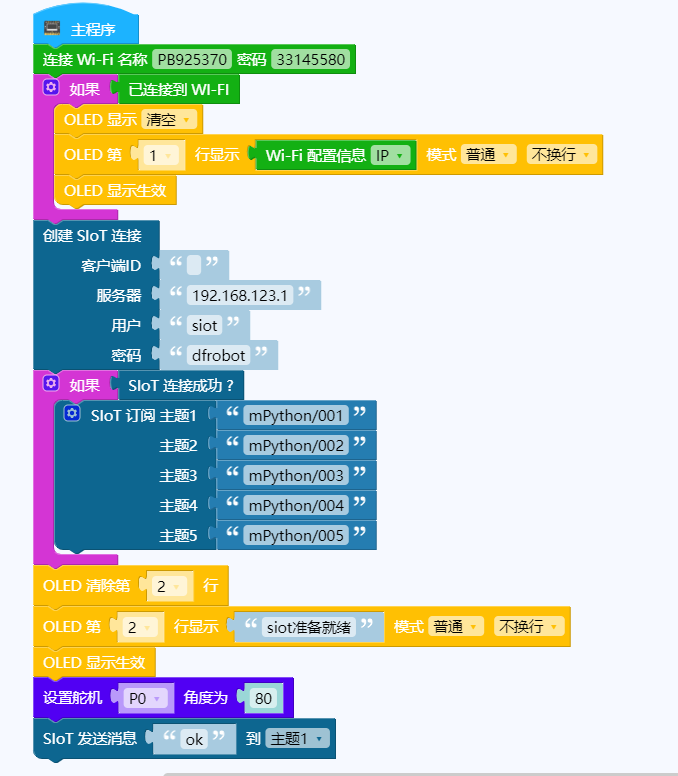
step 2 仰望-乐动小车编程
(还是上个帖子的程序)
【提示】使用时要先开启行空板载热点,后开掌控板,掌控板方可通过热点与行空连接。
运行mPython0.7.6
设置---高级设置---更换主控---乐动掌控

添加---执行器---电机(乐动),将左电机接入M2接口,右电机接 M1接口。

添加--执行器--舵机(乐动),舵机接P0口。

程序如下:
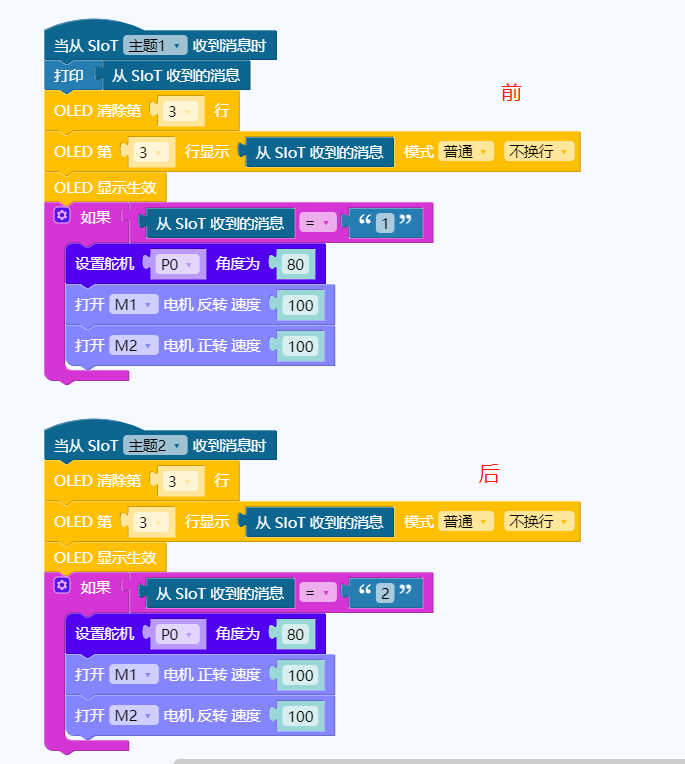


step 3 联机测试
【提示】使用时要先开启行空板载热点,后开掌控板,掌控板方可通过热点与行空连接及接入SIOT。

【任务小结】
用摇杆的感觉还是爽啊,不用看屏幕,上上下下,左左右右,向下按就停。
文件名:行空SIOT+仰望小车.rar
【END】
0
点赞
1条评论
返回顶部

广东省深圳市龙岗区坂田天安云谷一期3栋B座21楼





随时随地了解
编程教育最新动态
粤ICP备16049812号
Copyright © 2018 Shenzhen Sheng Si Science & Education Culture Co., Ltd. 深圳盛思科教文化有限公司